

9. SERVOMOTOR 180 GRADOS

Funciona con CARGAR y VIVO.
Información
El servomotor es un tipo de motor DC con reductora de velocidad que sólo puede girar 180 grados, en nuestro caso concreto. Se controla mediante el envío de impulsos eléctricos de Arduino. Estos pulsos le dice al servo a qué posición se debe mover y permanecer exactamente en aquella posición. El servo está en tensión y no debe moverse manualmente, ya que podría forzarse y deteriorarse. Para poder hacerlo debería desconectarse de la fuente de alimentación o que desde la programación se haya desactivado a través de código y así permanezca en reposo/desactivado.
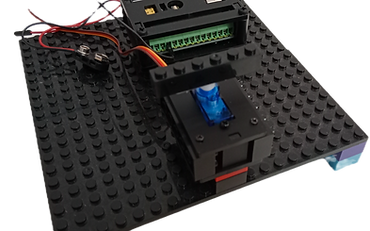
1. CONÉCTALO A LA PLACA PRINCIPAL

.png)
REGULACIÓN POSICIÓN INICIAL SERVO 180º
- Colocar el servo en posición elegida a tu prototipo, en este caso hacia arriba porque lo utilizaremos para una cabeza ultrasonido que pueda mirar a ambos lados.

- Con este código de bloques, le decimos que el servo conectado al pin 3, el rotor lo dejemos en posición inicial de 90º y en estado ON.

- Cuando el rotor esté posicionado en 90º, es el momento de colocar a mano suavemente la pieza de forma más recta y horizontal posible. Porque eso determinará en centro del servomotor.
- Después, suavemente colocaremos los componentes electrónicos que queramos encima de la pieza del rotor, para que pueda girar, en nuestro ejemplo es un detector ultrasonido de obstáculos.

PROGRAMACIÓN DEL SERVO 180º
- Como ya tenemos graduadas las posiciones iniciales correctamente determinamos que:

- Posición 0, equivale que gire el servo a la izquierda.
- Posición 90, equivale que gire el servo a posición inicial, es decir centro.

- Posición 180, equivale que gire el servo a la derecha.



- Estos son los grados de giro, desde 0 a 180.
- Posición 90 , y estado OFF le decimos al servo que descanse y este en función de STOP, eso nos hace ahorrar energía.
